|

1. Принцип работы.
Там где необходимо знать присутствие автотранспорта - нужен некий датчик.
Оптические самые дешевые, но не надежные. Засветка от солнца, сильный дождь, снег, грязь и они не работают или дают сбои.
Проходит человек или собака или это автомобиль - нет разницы. Ну или типичный случай, на датчик кто то повесил одноразовый
стаканчик и он не работает.
Датчик на основе видеокамеры - видеокамера и компьютер с программой распознавания дает
много возможностей, но дорого и есть проблемы с установкой и помехами - дождь, снег, грязь.
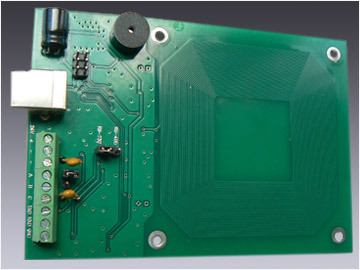
Индукционный датчик: в асфальте режется углубление, прокладывается петля из провода,
заделывается углубление. Принцип работы: петля из провода по сути есть катушка, у нее есть индуктивность.
Когда на петлю наезжает машина - индуктивность меняется. Индуктивность меряют так: берем генератор, частота
которого зависит от индуктивности петли, и меряем его частоту. Машина наехала, индуктивность уменьшилась,
частота выросла. По сути все просто, и на рынке продаются такие датчики, но как оказалось, пользоваться ими очень не удобно.
Так как частота плывет, и от температуры и от других факторов, и эти датчики либо это не учитывают, либо плохо учитывают
и в реальности получается что датчик срабатывает а машины нет, или машина наезжает на петлю а датчик не срабатывает, и
постоянно надо их сбрасывать (калибровать). Также они не запоминают опорную частоту и при пропадании питания, когда на петле машина. Когда питание появится эти датчики считают эту частоту опорной и не видят автомобиль.
Если автомобиль стоит на петле
долго - они не учитывают дрейф опорной частоты, - стояла машина долго, датчик либо ее теряет, либо машина уехала а датчик
"приклинил" и тд.
Поэтому нами было принято решение разработать свой датчик.
Было проведено исследование: чувствительность разных форм петель и размеров, разных проводов, количество витков,
разных частот (от 9Кгц до 500Кгц), разного напряжения на петле.
Тестировали петли в различных условиях: заливали водой до 30см, тестировали толстым слоем льда, влияние жары,
тень-солнце и т.д. Было достигнуто полное понимание процессов, влияние внешних факторов, достигнута
полная автоматика автоподстройки частоты, надежность, гибкие настройки порогов срабатывания, удобство
отладки и мониторинга, высокая скорость работы (теоретически "видит" авто до 520км в час).
Автономная работа, счетчик срабатываний, индикация срабатывания. Оптопара на внешней кнопке калибровки и разрядник
на петле для защиты от грозы.
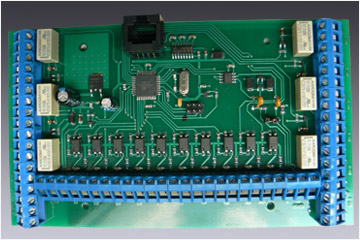
2. Характерные особености:
Датчик конфигурируется с помощью программы конфигурации по RS485 порту или с помощью DIP переключателей.
Полный сброс устройства: если при включении держать нажатой кнопку (или закоротить контакты 1 и 6 на разъеме возле процессора) от 5 до 10 секунд, - загорится светодиод и если отпустить кнопку -
то в EEPROM запишется конфигурация по умолчанию. Если держать дольше чем 10 секунд то сброса не произойдет.
Описание DIP переключателей:
DIP переключатели (1=ON 0=OFF)
DIP1 (8 переключателей).
1-й, 2-й переключатели: изменение частоты генератора (для тонкой подстройки сложных, много-петельных датчиков)
3-й переключатель: ON-программирование; OFF-режим индикации.
4-й, 5-й, 6-й, 7-й переключатели: управление режимом индикации, или режимом программирования (см. 3-й)
8-й переключатель: режим работы импульсного реле К2
DIP2 - изменение напряжения на генераторе (для тонкой подстройки сложных, много-петельных датчиков).
Описание реле К1 и К2:
Реле К1 срабатывает когда есть машина на петле и выключается когда нет.
Реле К2 подает импульс указанной длительности при наезде на петлю или съезде с нее (смотри DIP1.8).
3. Технические характеристики:
Два реле управления.
Напряжение питание 12В или 24В.
Наличие порта RS485.
Перемычка резистора-терминатора для RS485.
Температурный датчик.
|















")